
A team of researchers at Columbia University, funded in part by the Defense Advanced Research Projects Agency, have developed “machines that can grow by consuming other machines.”
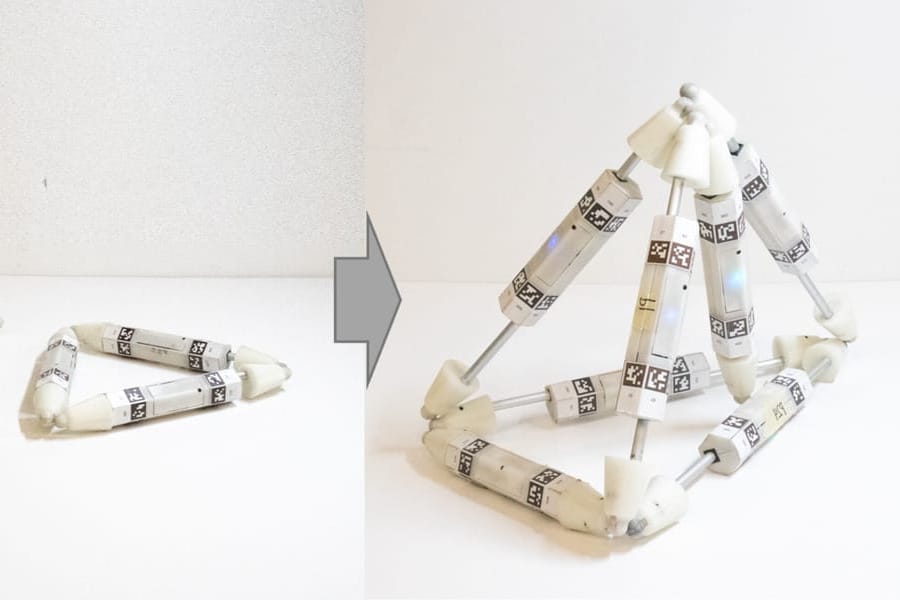
Video of the experiment shows tubular robots that move by extending their shafts to inch along the ground. As the tubes gather, they connect and form into more complex shapes like triangles and tetrahedrons. With each piece consumed, the whole moves faster and with more elegance.
This post is for paid members only
Become a paid member for unlimited ad-free access to articles, bonus podcast content, and more.
Subscribe
Sign up for free access to this post
Free members get access to posts like this one along with an email round-up of our week's stories.
Subscribe
Already have an account? Sign in